



























- 方案概述
- 相关产品
- 联系我们
激光雷达高速数据采集系统解决方案
激光雷达数据采集卡在项目中的应用分析:
当雷达探测到目标后, 可从回波中提取有关信息,如实现对目标的距离和空间角度定位,并由其距离和角度随时间变化的规律中得到目标位置的变化率,由此对目标实现跟踪; 雷达的测量如果能在一维或多维上有足够的分辨力, 则可得到目标尺寸和形状的信息; 采用不同的极化方法,可测量目标形状的对称性。雷达还可测定目标的表面粗糙度及介电特性等。
1、雷达原理
目标标记:
目标在空间、陆地或海面上的位置, 可以用多种坐标系来表示。在雷达应用中, 测定目标坐标常采用极(球)坐标系统, 如图1.1所示。图中, 空间任一目标P所在位置可用下列三个坐标确定:
1、目标的斜距R;2、方位角α;仰角β。
如需要知道目标的高度和水平距离, 那么利用圆柱坐标系统就比较方便。在这种系统中, 目标的位置由以下三个坐标来确定: 水平距离D,方位角α,高度H。

系统原理:
由雷达发射机产生的电磁能, 经收发开关后传输给天线, 再由天线将此电磁能定向辐射于大气中。电磁能在大气中以光速传播, 如果目标恰好位于定向天线的波束内, 则它将要截取一部分电磁能。目标将被截取的电磁能向各方向散射, 其中部分散射的能量朝向雷达接收方向。雷达天线搜集到这部分散射的电磁波后, 就经传输线和收发开关馈给接收机。接收机将这微弱信号放大并经信号处理后即可获取所需信息, 并将结果送至终端显示。
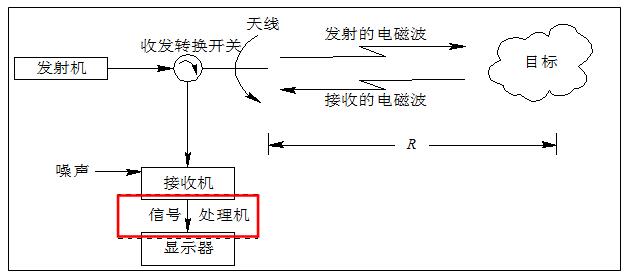
图1.2 雷达系统原理图
测量方法
1).目标斜距的测量
雷达工作时, 发射机经天线向空间发射一串重复周期一定的高频脉冲。如果在电磁波传播的途径上有目标存在, 那么雷达就可以接收到由目标反射回来的回波。由于回波信号往返于雷达与目标之间, 它将滞后于发射脉冲一个时间tr, 如图1.3所示。 我们知道电磁波的能量是以光速传播的, 设目标的距离为R, 则传播的距离等于光速乘上时间间隔, 即2R=ctr或
![]()

图1.3 雷达测距
2). 目标角位置的测量
目标角位置指方位角或仰角, 在雷达测量这两个角位置基本上都是利用天线的方向性来实现的。雷达天线将电磁能量汇集在窄波束内, 当轴时回天线波束轴对准目标时, 回波信号强, 如图1.4实线所示。当目标偏离天线波束波信号减弱, 如图上虚线所示。根据接收回波强时的天线波束指向, 就可确定目标的方向, 这就是角坐标测量的基本原理。天线波束指向实际上也是辐射波前的方向。
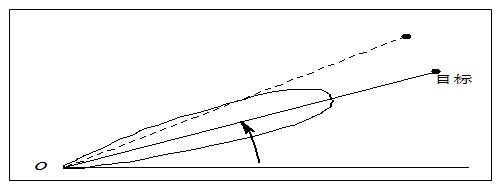
图1.4 角坐标测量
3). 相对速度的测量
对速度时, 接有些雷达除确定目标的位置外, 还需测定运动目标的相对速度, 例如测量飞机或导弹飞行时的速度。当目标与雷达站之间存在相收到回波信号的载频相对于发射信号的载频产生一个频移, 这个频移在物理学上称为多卜勒频移, 它的数值为

式中, fd为多卜勒频移,单位为Hz; vr为雷达与目标之间的径向速度,单位为m/s; λ为载波波长,单位为m。
当目标向着雷达站运动时, vr>0, 回波载频提高; 反之vr <0, 回波载频降低。雷达只要能够测量出回波信号的多卜勒频移fd, 就可以确定目标与雷达站之间的相对速度。
4). 目标尺寸和形状
如果雷达测量具有足够高的分辨力, 就可以提供目标尺寸的测量。由于许多目标的尺寸在数十米量级, 因而分辨能力应为数米或更小。目前雷达的分辨力在距离维已能达到, 但在通常作用距离下切向距离(RQ)维的分辨力还远达不到, 增加天线的实际孔径来解决此问题是不现实的。然而当雷达和目标的各个部分有相对运动时, 就可以利用多卜勒频率域的分辨力来获得切向距离维的分辨力。例如,装于飞机和宇宙飞船上的SAR(综合孔径)雷达, 与目标的相对运动是由雷达的运动产生的。 高分辨力雷达可以获得目标在距离和切向距离方向的轮廓(雷达成像)
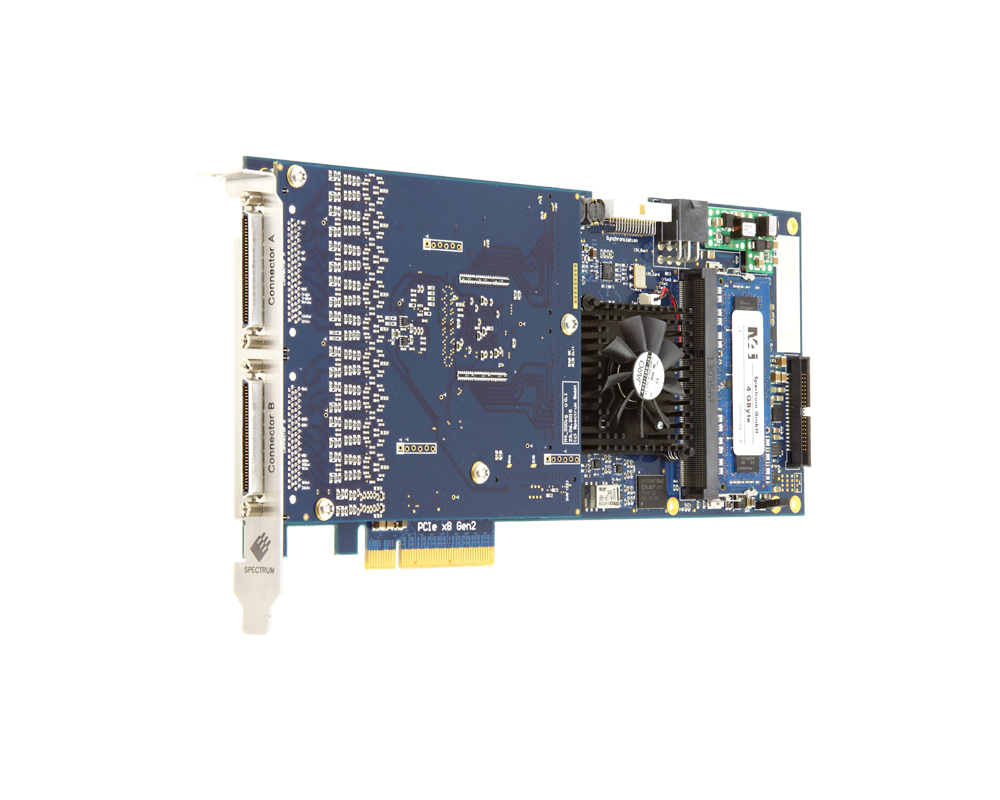
2、数据采集系统
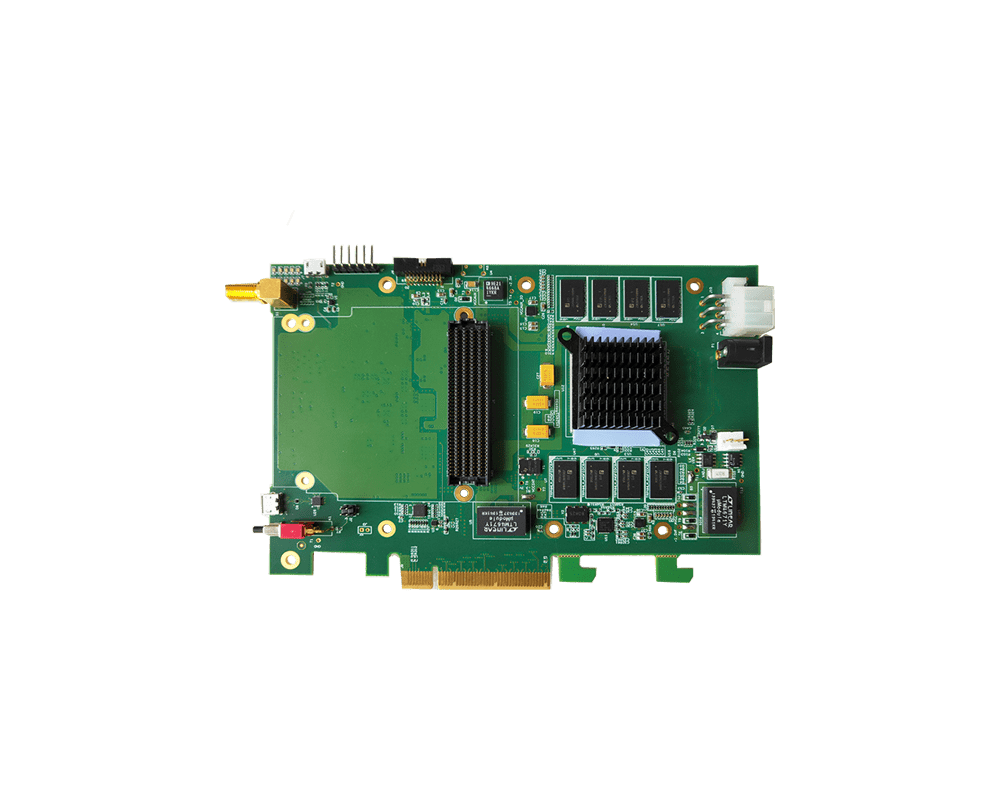
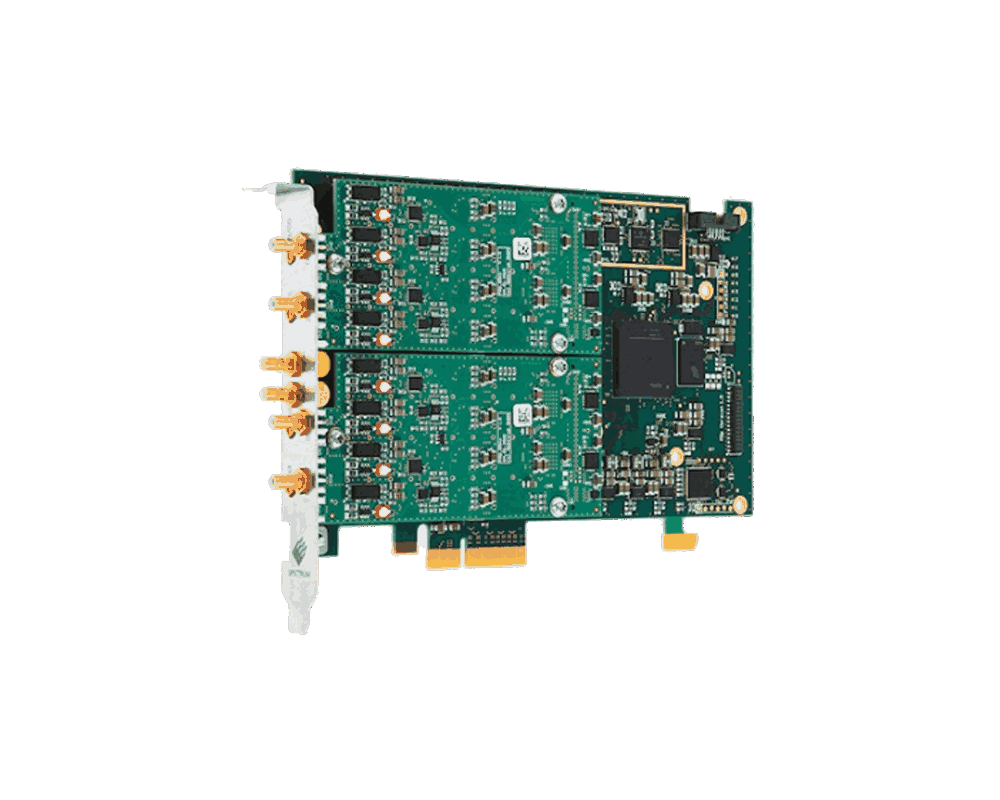
坤驰科技自主研发的QT1138是一款同时具备直流耦合程控放大器和支持宽带通讯信号输入的高速数据采集卡。这些特性使得QT1138成为激光雷达系统数字处理模块中应用的理想工具。QT1138提供快速的PCI Express 2.0 x8数据传输接口,尤其适合于OEM应用。QT1138的采样率在8通道工作工作模式下为250Msps/CH。模拟带宽在交流输入模式下高达300MHz,适合宽带IF采样应用;在直流程控输入模式下高达100MHz,适合高速窄脉冲采集;开发套件允许用户自定义实时处理算法。

系统性能
-
大支持8通道同步采集。
-
高250MSPS采样率。
-
采用250MSPS单芯片双通道ADC。
-
16bit 转换精度。
-
支持AC、DC藕合方式;支持高频脉冲信号输入。
-
大板载4GB DDR3存储器。
-
支持外部触发输入或输出。
-
PCIe x8 Gen2数据传输接口,连续传输率3.0GB/s。
-
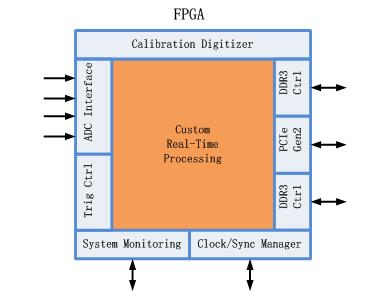
具有板载FPGA支持高速实时信号处理能力
-
FPGA支持用户自定义逻辑开发。
-
快速PCIe总线实时传输采集数据
-
捕获宽带信号。
-
提供开放的QTex逻辑开发平台
-
用户可自定义开发FPGA
-
大容量板载存储器
-
缩短开发时间,加快系统搭建速度
-
硬件可接受定制修改,如有此需求请联系坤驰科技
系统框图:

QT1138 通过PCI Express 8-lane 总线连接到计算机主机。每对Lane支持5.0Gbps(Gen2)的数据传输速度。QT1138采集卡采用PCI Express 16-lane 插卡的机械结构,使用其中8-lane物理连接。
QT1138使用PCI Express Gen2传输协议时,连续数据读写速度为3.0GB/s。对于一些较老的主板可能不支持PCI Express Gen2传输,QT1138 将自动降为PCI Express Gen1协议传输,此时连续数据读写速度为1.4GB/s。
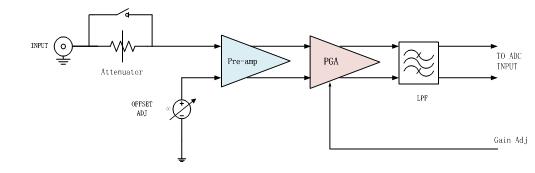
QT1138具有8个独立的模拟信号输入通道为用户提供4种输入方式选择:
选择:
标配:交流耦合
-OPT2:直流耦合
-
采用运算放大器直流耦合,单端输入
-
输入阻抗50Ω,输入范围2Vpp,软件可配置
-
默认输入带宽DC~100MHz
QT1138板载128位宽DDR3存储器用于缓存采集数据。DDR3读写数据率为1033MHz,能为用户提供大128Gb/s的数据吞吐率,支持各种采集模式下的数据并发读写。
采集时钟发生器

QT1138采用超低抖动时钟信号产生模块配合高稳定、低相位噪声时钟参考源来保证采集时钟的性能。时钟发生器采用独立的屏蔽模块,支持板载参考源、外部参考时钟源以及同步接口参考时钟输入。
FPGA开发包:
QT1138支持用户自定义逻辑开发,提供完整的FPGA逻辑工程,并提供Verilog-HDL的用户逻辑接口源代码。FPGA开发软件使用XILINX ISE 14.5。
同时开放FPGA JTAG 调试接口。用户可以使用XILINX USB-JTAG电缆和ChipScope 软件进行逻辑在线调试。

3、应用领域
-

QT1140-PCIe总线直流耦合采集卡
支持2通道同步采集 最高125MSPS 采样率 16bit 采样精度
-
QT12135-宽带中频采集卡
1GS/s采样率 16bit垂直分辨率 2/4通道采集
-

QT SATA IP
1.支持Xilinx 7系列FPGA。 2.支持SATA Gen3。 3.支持自动协商协议。 4.QT SATA IP 基于Xilinx GTX,包括物理层、链路层、传输层以及命令层等。 5.支持PIO和DMA操作。 6.基于FIFO模式的用户逻辑接口。
-

QT20136-宽带中频采集卡
坤驰科技自主研发的QT20136是一款同时支持交流耦合与双极性宽带信号输入的高精度高速数据采集卡,它提供4路14位1.0GS/s A/D通道,全功率模拟带宽(-3 dB)2GHz。
